♦ 🐆 5 min, 🐌 10 min
Clumsy AngeLJ team
Dragon Hack 2019: For non-geeks. Dragon Hack is a hackathon, an event where you work on a project with your team for 24h. It usually contains no sleep. After 24h, you present your project to others and maybe win a prize. After three years I'm always amazed how well our team operates no matter the fact that we don't know till last minute what we'll be making at the hackathon 🙂 Most of the time we don't really have a clue what we're doing so Google is our best friend. We learn through the hackathon what we need. The only thing that's crystal clear is in what area each team member will be googling in:- Tadej is our software expert. He builds our web site, web server, and chooses the proper web site colour. He makes sure that we have a beautiful product at the end of 24 hours. He covers all the screws ups the electronics-hardware side of the team makes.
- Ziga G. is our in-house electronics-microcontroller expert. LED-s, Pi Zeros, sensors, Pi-s, Arduino's and all sorts of other wired chines microcontroller's are his domain. If you need an electronic component, he has it. He's our crazy idea generator and never fails to deliver.
- Rok is our new member who reinforced our hardware front, with microcontroller's and CAD design knowledge. Without his help, this year's elevator idea would remain just an idea.
- In previous years we had Maks in our team. He was our software-hardware-mobile app expert. This year he was only our emotional support via Facebook since he's now working abroad.
- I supply our team with the hardware. Tools, soldering, 3D modelling, debugging, support structures for electronics, ... The duck tape approach. I maybe do some programming there and then. I help where needed when the others lose their patience 😛
Battle plan
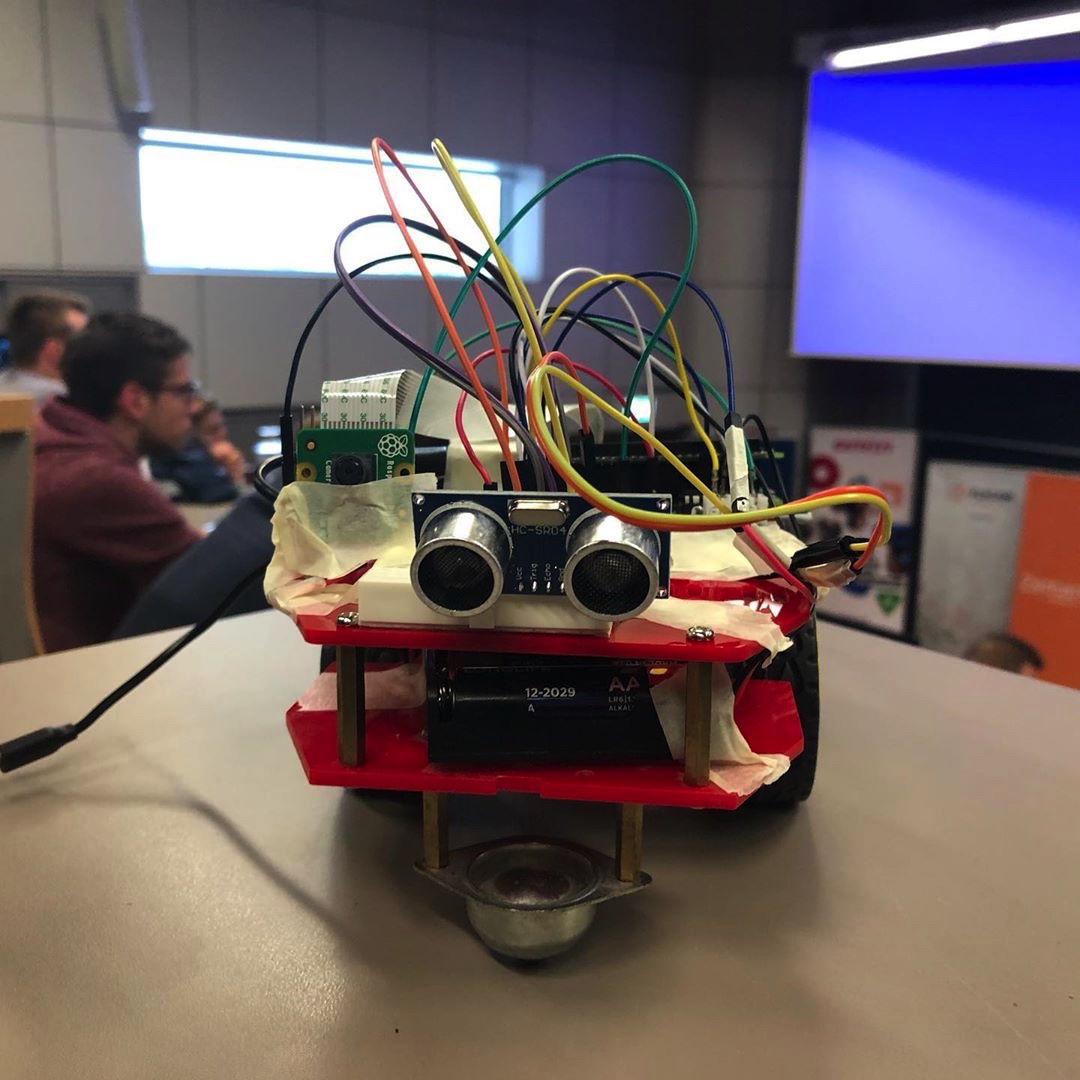
We started our hackathon with a nice lunch. We had a rough idea that we'll have a car, elevator and a website. But the rest had to be figured out. After a heated discussion, we settled on building a car (with a lot of sensors). You control the car via the web site so you can explore an area dangerous to humans. The electric car is green and expandable compared to humans. But the full system had to contain: blockchain, a car, an elevator on a car, real-time video stream, sensors (for: temperature, magnetic field, pressure, humidity, position), obstacle and a web site with some server as back end. Oh and we wanted to build sensor units that we user can fire around on demand from the web site.Battle plan was glorious. The result was well: Duck taped and hacked together. 🤓Development
As usual, we had plenty of electronics and tools with us. But there's always something missing 😢. So after we picked the last missing components from the hardware corner, we started hacking. Tadej on the web site, Ziga on the live video stream, Rok on building first car prototype and I tried to figure out how we can write our own blockchain code.

Last 1.5 hours of hacking:
At some point, I went to pick up some tools from our team desk. After a quick chat with my team, I realized that things were not working as we hoped. I did sense slight panic in my teammates voices before. But at 10:30, I knew I had to scrub the elevator idea and go help with the other hacks, or we might as well have nothing. For the next hour, I helped with fixing and causing bugs. I helped Tadej with integrating the blockchain into our web site. We used a blockchain because well it's fancy and because we wanted a reliable storage format for measured data from our robot. We didn't want anyone to corrupt out temperature measurements 😛 Then the last 15min were even crazier. Nothing worked. The web server was crashing, Raspberry Pi wasn't recognizing the sensor module or didn't start at all, car motors didn't work, the Arduino controlling the car didn't work (loose wires), ... The usual. To get through we had to support each other. Teamwork was now essential. Conversations got heated. But somehow we managed to fix everything 🙂 I have to say it. My teammates did the lion share on the debugging part. I mostly helped a bit there and then.
Results
On the website part I don't even know what we had 🙂 I know that it looked amazing as always.git repo of code on the link . The ballistic module was a proper hackathon product. Duck tape all over the place 🙂 Long story short you press a button on the web page, and that little blob in the right bottom corner flies away.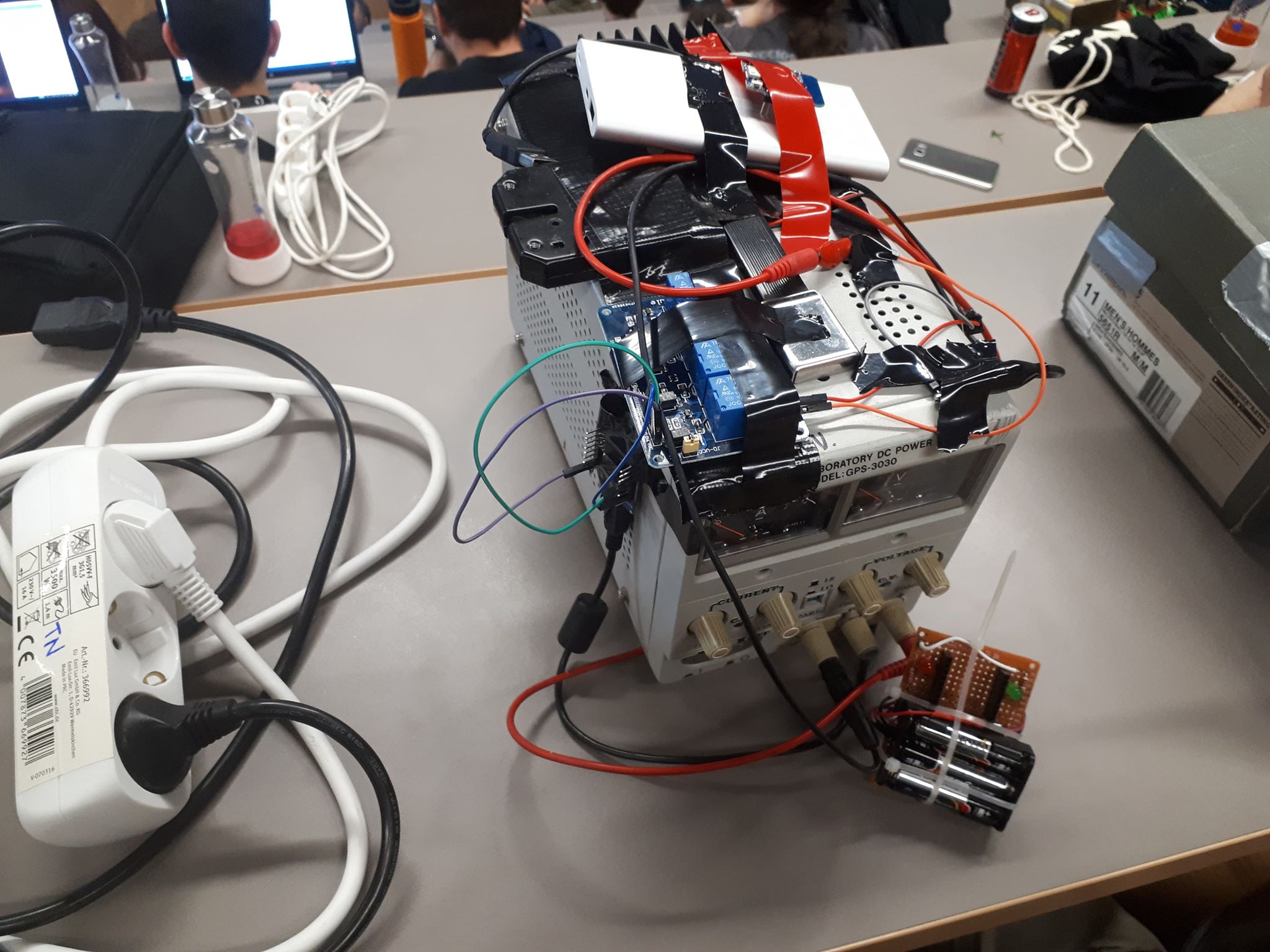
Wrap up
My role in the hackathons is always kind of funny. Because these days I spend most of my time programming web pages, doing data science and physics. But at hackathons, I always do some sort of hardware. This year I coded a bit since it was the first year that I had some useful programming knowledge. I think I fixed my fair share of bugs this year, but I'll let my team be the judge of my contributions 😉As a team, we had conflicts. But we always quickly resolved them. After all, we are there to have fun. Although I'm too serious sometimes 🙂 This year we went way too crazy on hardware. Well, we had too many side projects in play through the 24h. Yeah if you counted, we worked on 9 different projects. We finished 8 but didn't manage to polish our idea well enough at the end. For me, that was the first hackathon where we didn't manage to score a prize 😛 but also a hackathon where I would dare to say that I learned the most. So my goal was achieved 🙂 I had fun. Mostly thanks to my amazing teammates. Hope we do this again next year guys 😂Get notified & read regularly 👇